
Como selecionar motores de catraca para pedestres: uma comparação baseada em dados de vida útil, velocidade e estabilidade
Ao comprar pedestrecatracas, muitos clientes concentram-se inicialmente na aparência, nos materiais ou nos métodos de identificação (cartões RFID, reconhecimento facial, códigos QR).
Contudo, na operação real do projeto, o fator fundamental que realmente determina a estabilidade, a durabilidade e a experiência do usuário do equipamento está em um nível mais profundo:
Do ponto de vista da engenharia e da aplicação, este artigo combina especificações técnicas com experiência de campo para ajudá-lo a compreender as diferenças entre soluções de motores e como selecionar a solução ideal para o seu projeto.
1. Por que o motor define a estabilidade da catraca?
Com base em dados operacionais e de manutenção de vários projetos de portões para pedestres, as estatísticas revelam que:
a) Aproximadamente 60% a 70% das falhas de equipamentos têm origem no sistema de movimento.
b) Mais de 50% destes problemas estão diretamente relacionados ao motor e seus componentes de acionamento. Isso indica que o sistema motor é o principal fator que determina a vida útil, a estabilidade e a experiência geral de rendimento de uma catraca.
Também é comum encontrar os seguintes cenários em aplicações de campo:
c) A operação inicial é suave e normal.
d) Após 1–2 anos de uso, o equipamento começa a apresentar falhas, ruídos anormais e falhas frequentes.
Ao rastrear a causa raiz, a maioria desses problemas está diretamente ligada ao tipo de motor e à sua metodologia de controle.
2. Comparação de dados principais de diferentes soluções de motores
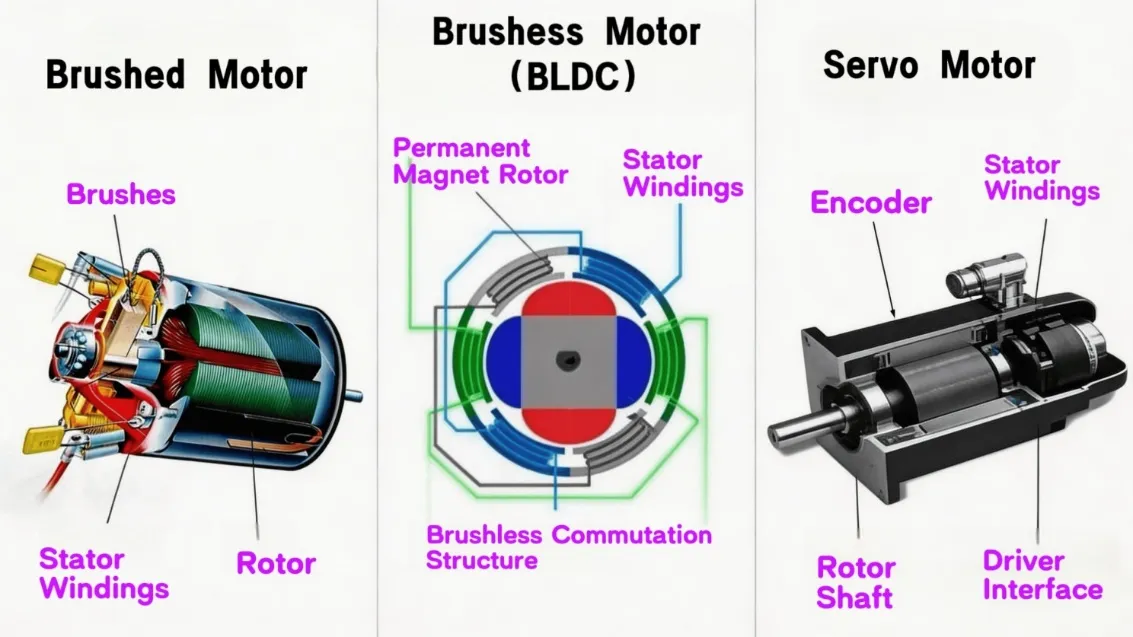
Atualmente, pedestrecatracasno mercado utilizam principalmente três soluções de motores: motores escovados, motores CC sem escovas (BLDC) e servomotores. A seguir está uma comparação de parâmetros típicos de engenharia (faixas padrão da indústria:
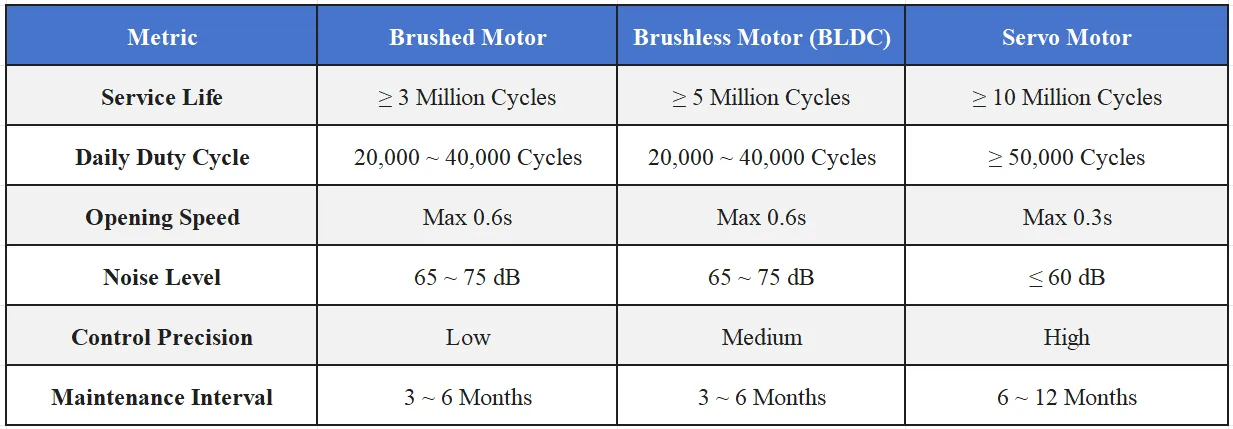
Na seleção de projetos reais, normalmente priorizamos soluções de motores com base na frequência de produção e na vida útil, em vez de simplesmente comparar os custos dos equipamentos. Em comparação com os motores escovados tradicionais, os motores sem escova (BLDC) podem aumentar a vida útil em 2 a 3 vezes, enquanto os servomotores oferecem mais avanços em velocidade, precisão e segurança.
3. Eficiência de rendimento: melhoria quantificável na experiência do usuário
Muitos clientes expressam o desejo de “catracas mais suaves”, mas “suavidade” é na verdade uma métrica quantificável.
a) Velocidade de abertura (impacto direto nas filas)
Motor escovado: Aprox. 0,6s
Motor sem escova (BLDC): Aprox. 0,6s
Servo Motor: Tão rápido quanto 0,3s
Em edifícios de escritórios e projetos de parques industriais (com tráfego diário superior a 20.000+), as seguintes taxas de rendimento são claramente observáveis:
Motor escovado: Aprox. 25–35 pessoas/minuto
Motor sem escova (BLDC): Aprox. 25–35 pessoas/minuto
Servo Motor: 35+ pessoas/minuto
A diferença é imediatamente sentida se um lobby enfrenta filas ou
congestionamento.
b) Suavidade Operacional (Eliminando "Gagueira")
O fator principal é a capacidade de controle de aceleração e desaceleração:
Motor escovado: Sem controle → Ciclos de partida/parada severos.
Motor sem escova (BLDC): Perfis de movimento básicos → Geralmente suave.
Servo Motor: Aceleração/desaceleração em curva S → Praticamente livre de impacto.
Em cenários de trânsito de alta frequência, essas diferenças são continuamente amplificadas, impactando diretamente a experiência geral do usuário.
c) Controle de Ruído (Impacto Ambiental)
Ambientes de escritórios comerciais normalmente exigem: Nível de ruído ≤ 50 dB
Motor escovado: 60+ dB (ruído perceptível).
Motor sem escova (BLDC): Geralmente compatível com os padrões.
Servo Motor: Operação quase silenciosa.
4. Capacidades de segurança: o impacto crítico da variação motora
a) Velocidade de resposta anti-pinçamento
b) Motor escovado: 100–300ms
c) Motor sem escova (BLDC): 50–100ms
d) Servo Motor: 10–50ms
e) Quanto menor o tempo de resposta, maior o nível de segurança – diferença que se torna crítica em cenários de tráfego de alta densidade.
Resumo: Como evitar armadilhas comuns na seleção?
Se você tirar apenas uma coisa, que seja esta: a verdadeira diferença entre as catracas não está na estética exterior, mas nos motores e sistemas de controle.
Para ser mais específico:
a) Cenários de Baixa Frequência: Motores escovados são uma opção viável.
b) Projetos padrão: Motores sem escova (BLDC) são a escolha preferida.
c) Projetos de alta tecnologia: Servomotores são altamente recomendados.
Conclusão: Escolher o motor errado leva a custos contínuos de manutenção; escolher o motor certo transforma seu equipamento em um ativo estável e de longo prazo. Se você está atualmente no processo de seleção de projetos, recomendo focar nas seguintes áreas principais: Tipo de motor (seja sem escova ou servo), Método de controle (seja com controle de aceleração e desaceleração), Histórico comprovado (Disponibilidade de dados operacionais reais do projeto). Em projetos específicos, adaptar o motor e o esquema de controle aos requisitos reais do tráfego é muitas vezes muito mais eficaz do que simplesmente comparar especificações técnicas.



